Interaction with animals has long been known to be emotionally beneficial to people. In recent years, the effects of animals on humans have been researched and proved scientifically. Friedmann investigated the one-year survival rate of patients who were discharged from a coronary-care unit and found that survival among those who kept pets was higher than among those who did not (Friedmann et al., 1980). Baun et al. reported that patients’ blood pressure dropped when they petted their dogs (Baun et al., 1984). Garrity et al. studied older people who were socially isolated and had lost their partner during the previous year, and found that the intensity of depression among those who had no pets was higher than among those who did (Garrity et al., 1989). Lago et al. researched through telephone interviews the influence on older people of owning pets. They found that mortality and attrition were higher for former owners than for current owners (Lago et al., 1989). Hart et al. studied the social influence of animals on people, and found that those with dogs were approached in a friendly way by strangers more frequently than those without dogs (Hart et al., 1987).
In medical applications, especially in the United States, animal-assisted therapy and activities (AAT&AAA) are becoming widely used in hospitals and nursing homes (Delta Society, 1996; Fine, 2006). AAT has clear goals set out in therapy programs designed by doctors, nurses and social workers, in cooperation with volunteers, while AAA refers to patients interacting with animals without particular therapeutic goals, and depends on volunteers. AAT and AAA are expected to have three effects:
- a psychological effect (relaxation, motivation);
- a physiological effect (the improvement of vital signs);
- a social effect (stimulation of communication among inpatients and caregivers).
For example, a hospitalized child, who was in significant pain on account of his illness, was afraid to get up and walk around. However, when he was asked to take a therapy dog for a walk, he immediately agreed and walked off happily, as if all his pain had disappeared. Moreover, the dog acted as a medium for interaction between him and the other children (Kale, 1992). In another case, a boy who was born as a crack-exposed baby was unable to speak or walk. However, through interaction with therapy dogs and birds, both his linguistic and motor abilities improved (Delta Society, 1991).
For AIDS patients, it is important to reduce their stress as it greatly affects the complications of immune deficiency. AAT helps them to relax and stay connected with the world (Haladay, 1989).
In addition, AAT and AAA at nursing homes help to rehabilitate older people, make them laugh, and bring happiness to patients who have only a short time to live (Gammonley and Yates, 1991). AAT reduces loneliness in residents of long-term care facilities (Banks and Banks, 2002). The presence of therapy animals has been particularly useful in reducing agitated behavior, decreasing episodes of verbal aggression and anxiety, and increasing social interaction among institutionalized old people suffering from dementia (Richeson, 2003; Fick, 1993; Fritz et al., 1995).
However, most hospitals and nursing homes, especially in Japan, do not allow animals, although they recognize the positive effects of AAT and AAA. They are afraid of the negative impact of animals on human beings, in the form of allergic reactions, infection, bites, and scratches.
Society in most advanced countries is aging. Among them, Japan has the most old people: 23.1 percent of the population (29.4 million out of 127 million) in 2010 are more than 65 years old. Many old people stay healthy, but some of them need care at home or in institutions, depending on their levels of physical disabilities and cognitive disorders. Among the cognitive disorders, dementia presents the most problems. About 2 million people suffer from dementia in Japan In 2010.
Mental-health care for the elderly is an important issue for caregivers at nursing homes (Daies and Knapp, 1981) as depressive disorders are common among old people who have experienced difficult situations such as the loss of their family, friends, social roles, and physical functions (WPA/PID). In addition, those who suffer from mental diseases such as dementia, hallucinations, aggression and wandering cause psychiatric and behavioral disturbances (ADI, 1999). Such disorders have a negative impact on their quality of life and that of their caregivers. In order to improve communication with older people, caregivers conduct recreational activities, such as singing songs, coloring, drawing pictures, and origami. However, some people are too embarrassed to sing songs, and others lack finger mobility when attempting to draw. In addition, communication is complicated on account of a lack of common topics.
This paper introduces robot therapy for “life innovation”, and discusses its potential in care for the elderly. The next section describes the new area of robotics: human-interactive robots for psychological enrichment. We then explain the required functions for therapeutic robots and the seal robot, Paro. Finally, we describe examples of robot therapy for older people, and present our conclusions.
Human-interactive robots for psychological enrichment
Industrial robots have been used widely in manufacturing industries since the early 1960s. Industrial robots typically perform welding, assembling, painting, packaging, and palletizing in automotive manufacturing and other industries. Such robots work very fast and accurately, although initially they need to be taught by a human operator and their environment needs to be especially designed to enable them to accomplish their tasks. Most industrial robots are considered a potential danger to humans, and therefore are kept isolated from them.
Meanwhile, the rapid development in high technology has produced robots not only for factories but also for our living environment, such as homes, offices, and hospitals. For example, wheelchair robots enable elderly people to move easily outside (Matsumoto et al., 2006). Robotic suits, which can expand the physical capability of humans, are expected to reduce the workload of caregivers (see HAL). A horseback-riding robot promotes a patient’s physical strength (see JOBA). Human-interactive robots for psychological enrichment, in particular, are expected to be a new application of robotics and are attracting many researchers and companies (Shibata, 2004). Human-interactive robots are designed for entertainment, communication (social activity), guidance, education, welfare, mental therapy, and other purposes. Various types of robots, such as humanoid, animal, and robots with a unique appearance, have been developed.
These robots offer more interaction with humans than industrial robots. They are evaluated not only in terms of objective measures, such as speed and accuracy, but also in terms of subjective measures regarding interacting with humans, such as providing comfort and happiness. Robots for entertainment are good examples of the importance of a subjective evaluation of their value (fig. 1).
Figure 1. Objective and Subjective Measures for Evaluating Artifacts
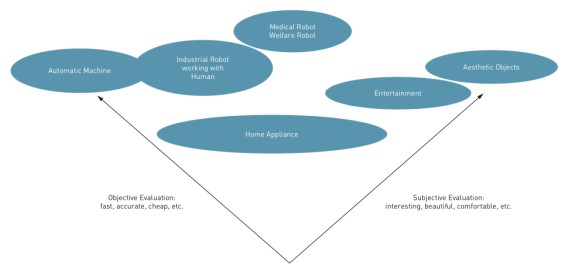
There are four categories of human interactive robots for psychological enrichment, in terms of their relationship with humans: 1. performance robots; 2. tele-operated performance robots; 3. operation, building, programming, and control robots; and 4. interactive autonomous robots.
Performance robots:
Performance robots have a long history and they execute movements that express meanings to humans, mostly for entertainment. Mechanical puppets that were able to play an organ, draw pictures, and write letters were developed in Switzerland in the 18th century. Karakuri dolls were developed in Japan during the same era to dance, perform magic tricks, and so on. Recently, many performance robots have been used at exhibitions, museums, movies, and amusement parks such as Disneyland and Universal Studios. Recent humanoid robots, such as Honda’s ASIMO and Sony’s QRIO, can be included in this category (Hirai, 1998; Kuroki et al., 2002). Performance robots are able to amuse sizable audiences at any time. However, their movements are probably preprogrammed and mostly repetitive; therefore, they are not usually very interactive with humans. A high degree of complexity in performance robots is required in order to keep humans amused.
Tele-operated performance robots:
Tele-operated performance robots are controlled remotely by hidden operators. Their movements can appear reactive to the humans who interact with them because the operator, based on the audience’s actions, sends commands to the robots to simulate reactive behavior. At exhibitions or amusement parks, for example, human-type robots are used as tele-operated performance robots.
Operating, building, programming, and controlling robots:
Humans derive a great deal of entertainment from operating, building, programming, and controlling robots. Moreover, they can watch the performance of the robots that they are operating. A simple example of this is the “UFO catcher”, a stuffed-animal game machine at amusement centers. Building and programming a robot is also included in this category. Contests between robots such as Micro-mouse, RoboCup (robot football, Kitano et al., 1998), and RoboOne (robot wrestling, see Robo-One) are popular examples, as are LEGO-Mindstorms and I-Blocks. Because building and programming robots can stimulate children’s creativity, this activity combines entertainment with education, and is often referred to as “edutainment” (Druin and Hendler, 2000; Lund, 2004).
Interactive autonomous robots:
Interactive autonomous robots connect with humans in the physical world. They use verbal and nonverbal communications, depending on their functions. Contrary to the interactions of robots in the other categories, human-robot interactions are mostly personal. For example, Sony’s dog robot, AIBO, which is designed for entertainment, has a mechanical appearance and attracts people’s interest using nonverbal communication (Fujita, 2004). The communication robot, Ifbot, produces conversation using facial expressions and a large number of prepared conversation scenes (see ifbot). The human-friendly information terminal, PaPeRo, can control home electric appliances and collect information via the Internet by voice command, and even entertain people by dancing and playing games (see PaPeRo). Guide robots in museums and exhibitions (Bischoff and Graefe, 2004), and mental-commitment robots described in this paper also belong to this category.
In the area of welfare and mental therapy, Shibata et al. studied and developed a mental-commitment robot, which aims to engender mental effects, such as pleasure and relaxation, in its role as a personal robot (see Shibata, 1996-2009). They also proposed “robot therapy,” which used robots as substitutes for animals in animal-assisted therapy and activity. Robot therapy targets the people in medical and welfare institutions where animals are not allowed. A seal-type mental-commitment robot, named Paro (fig. 2), was developed especially for robot therapy and is used at pediatric hospitals and facilities for elderly people in several countries. Recent research has revealed that robot therapy has the same effects on people as animal therapy. Robot therapy, in particular, is recognized as a new method of mental health care for elderly people (including dementia patients).
Figure 2. Seal Robot, Paro

Therapeutic robot
Required functions
In robot therapy, it is important to stimulate people’s knowledge and experience of animals through interaction with the robots, and to touch their feelings when they are interacting with animals. Therefore, the shapes, feelings of touch, autonomous behaviors and responses that mimic animals are the features that are required in the robots.
In addition, the devices are used not only in people’s homes but also in hospitals and nursing homes. Many people who have lost their physical strength and healing capability on account of aging or illness are expected to interact with the robots. Therefore, the robots must be easily accepted by people and also be harmless and hygienic. A cause of concern regarding such robots is that individuals are expected to physically interact with them by touching and hugging them, and therefore there exists a possibility of them being harmed. Furthermore, in case robots are used by hospital patients with deteriorated immune systems such as leukemia, the robots may transmit germs. Furthermore, some people visit medical-welfare facilities for a few hours at a time for day care and ambulant treatment, but some stay or are hospitalized for years (e.g., in nursing homes for long-term care). Therefore, the robots have to sustain long-term interaction with people in their daily lives.
These robots are used by doctors, nurses, therapists, caregivers, and volunteers for long periods of time. In addition, users play with them whenever they want. Therefore, it is important that the robots be designed in such a manner that anyone is able to operate them, and that no specialized knowledge is required to do so.
Mental-commitment robot, Paro:
Mental-commitment robots are not intended to perform physical work or service (see Shibata, 1996-2009). Their function as personal robots is to engender mental effects, such as pleasure and relaxation. These robots have a purpose and act independently, although, like living organisms, they receive stimulation from the environment. Their actions during interaction with people make it seem that they have hearts and feelings.
Mental-commitment robots are able to stimulate the different senses of human beings through physical interaction. Thus, the primary characteristic of mental-commitment robots is nonverbal communication. A basic psychological experiment was conducted on the subjective interpretation and evaluation of robot behavior following human-robot interaction. This study showed the importance of appropriately stimulating the human senses and extracting associations. Sensor systems, consisting of visual, aural, and tactile senses for robots, were studied and developed. A plane soft tactile sensor was developed to cover the robot to enhance bodily contact between people and the robot (Shibata, 2004). This sensor can detect position and force when people touch the robot, and at the same time, it is soft to touch.
There are three categories of animal robots:
- familiar animals (e.g., dog, cat);
- unfamiliar animals (e.g., seal);
- imaginary animals or characters.
The dog, cat, and seal robots were developed as models. Each robot operates using its three internal elements, sensory information from its sensors, and its own diurnal rhythm (morning, afternoon, and night) to perform various activities during its interaction with people.
Subjective evaluations of the cat and seal robots were conducted using a questionnaire (Shibata et al., 1999; Shibata and Tanie, 2000). Both robots were evaluated highly. However, subjects complained about the softness and reactions of the cat robot in comparison with their knowledge of real cats. On the other hand, most people do not have much knowledge of seals, and hence were unable to compare the seal robot with what they knew about them. Therefore the evaluation of the seal robot following the interaction was higher. These results revealed that more people accepted the unfamiliar animal shape.
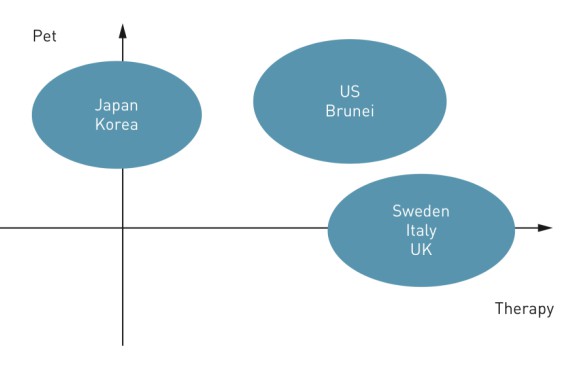
Cross-cultural studies on the subjective evaluation of the seal robot were conducted in seven different countries: Japan, the UK, Sweden, Italy, Korea, Brunei, and the US (Shibata et al., 2002; Shibata et al., 2009). The data were obtained from about 2,000 respondents. The subjective evaluation provided overall high scores, and revealed that the seal robot could be widely accepted despite cultural and religious differences. However, from the results of the principal component analysis, there were two different sets of expectations regarding Paro: one was as a pet, and the other was for therapy (fig. 3). In Asian countries, Japan and Korea, people accepted Paro as a pet, but not for therapy. In European countries, the UK, Sweden, and Italy, people accepted Paro for therapy, but not as a pet. In the US and Brunei, people accepted Paro as a pet and for therapy. This may be because of the different relationships between humans and pets, and the attitudes toward robots in general. In Asia, pets are popular, but their status is lower than that of humans. In addition, animal therapy is not known or trusted very much. In Western countries, however, pets are loved and their status is equal or higher than that of humans. In addition, animal therapy is well known and is practiced. However, robots are considered to be dangerous or even evil, and there is a fear that jobs might be taken by them.
Figure 3. Expectations of Paro from Results of Questionnaires in Seven Countries
The seal-type mental-commitment robot, Paro, was designed both as a pet and for therapy. Even though Paro’s surface is covered with pure white or light gold fur (fig. 2), Paro contains high-tech mechanisms (fig. 4). Ubiquitous surface tactile sensors are inserted between the hard inner skeleton and the fur to create a soft, natural feel and to permit the measurement of human contact with Paro. His weight is approximately 2.7 kg., his weight and size simulating those of a human baby. Paro has four senses: sight (light sensor), audition (determination of sound source direction and speech recognition), balance, and a tactile sense. In addition, Paro has a temperature sensor, which maintains a constant warm body temperature. His mobile parts are as follows: vertical and horizontal neck movements, front and rear paddle movements, and independent movement of each eyelid, which is important for creating facial expressions.
Figure 4. Sensors, Actuators, Distributed Control System, and Artificial Intelligence in Paro

In order to be evaluated highly by people interacting subjectively with him, Paro was functionally designed to be soft and evoke a feeling of warmth. Each Paro was trimmed with artificial fur, and eyelashes were sewn onto him by craft workers to achieve high quality (fig. 5). In addition, his artificial fur is antibacterial and dirt resistant, and will not fall out. An electromagnetic shield was installed in the internal circuit to prevent any ill effects on pacemakers. The withstand-voltage test, a drop test, a one hundred-thousand times stroking test, and a long-term seven- year clinical test confirmed that Paro is very safe and durable. Paro was designed to be simple enough for anyone to operate. He has only one on/off switch for power, and a pacifier-type charger. Artificial intelligence enables users to learn Paro’s name and become acquainted with his behavior, thereby preventing them from losing interest, allowing them to gradually build a relationship with him, and showing their affection for him. In addition, baby harp seals were investigated so that their liveliness and cuteness could serve as models for the robot; real baby seal calls were sampled and used.
Robot therapy
Robot therapy using seal robots is conducted at hospitals and nursing homes in many countries: Japan, Sweden, Denmark, Italy, the US, and so on. Robot therapy consists of robot-assisted therapy programs designed by doctors, nurses, and social workers, and also robot-assisted activity, which allows patients to interact with robots without any particular therapeutic goals. Such activities do not depend on volunteers, but are conducted by facility staff. Robot-assisted therapy is mainly conducted at medical facilities, such as hospitals and clinics, and also at welfare facilities such as nursing homes.
Robot therapy for the elderly
As an example of robot therapy, Paro was used to assist elderly people at a day service center (Shibata et al., 2001; Saito et al., 2002; Wada et al., 2004). To investigate the effects of seal robots on the elderly, their moods were evaluated using face scales (Lorish and Maisiak, 1986) and questionnaires. Changes in their reactions to stress were measured by the hormones in their urine: 17-ketosteroid sulfate (17-KS-S) and 17 hydroxycorticosteroids (17-OHCS) (Selye, 1970; Nishikaze et al., 1995). In addition, the stress that the nursing staff experienced was investigated by questionnaires — i.e., the burnout scale (Pines, 1981). The day service center was provided with seal robots for five weeks, and the feelings of the old people improved as a result of their interaction with the robots. Urine samples showed that their ability to overcome stress also improved. Moreover, the stress levels of the nursing staff decreased because the old people required less supervision while interacting with the robots.
A long-term experiment was conducted at a health-service facility, starting in August 2003 (Wada et al., 2004). Approximately 10 people joined the interaction with Paro for one hour, twice a week. One or two caregivers managed the interaction with Paro. To investigate the effects of Paro, face scales and geriatric depression scales were used (Yesavage, 1988). The results showed that the feelings of the old people improved over the year, and depression in the participants was also reported to have decreased. The caregivers commented that interaction with Paro made the old people laugh and become more active. Their facial expressions changed, softened, and brightened. On the day of the activity, they looked forward to interacting with Paro, sitting down and waiting even before the interaction session began. Some people who usually stayed in their rooms came out and willingly joined the activity. In addition, Paro encouraged people to communicate with each other as well as with the caregivers by becoming their common topic of conversation. Thus, the general atmosphere became brighter. Even now, these older people enjoy playing with Paro.
In another example, Paro was introduced in the public area of a care house, a type of communal housing for older people, and was activated for over nine hours each day for the researchers to investigate the effects of free interaction with him (Wada and Shibata, 2007).To examine the psychological and social effects, each subject was interviewed and his or her social network analyzed. In addition, the activities of the residents in public areas were video recorded. For physiological analysis, residents’ hormones in urine; 17-KS-S and 17-OHCS, were analyzed. The results indicate that interaction with Paro increased their social interaction. Furthermore, the urine tests showed that the reactions to stress of the subjects’ vital organs improved after interacting with Paro.
Effects on patient with dementia
Dementia is a major problem in care for the elderly. According to Alzheimer’s Disease International (ADI), an estimated 24.4 million people suffer from dementia worldwide, and the number will increase to 82 million by 2040. Dementia is a progressive, disabling neurological condition that occurs in a wide variety of diseases. The most common cause of dementia is Alzheimer’s disease (AD), which accounts for approximately half of the people with dementia. Other causes include vascular disease, Lewy body dementia, and many other diseases (see ADI, 1999). Psychiatric and behavioral disturbances, such as personality changes, hallucinations, paranoid ideas, aggression, wandering, and incontinence are common features of dementia and are the leading causes of the need for long-term care (Garrity et al., 1989). Donepezil, physical exercise, and diet cure are expected to slow the progress of dementia (Andrade and Radhakrishnan, 2009). But unfortunately, there is no permanent cure for dementia at present. Recent data suggest that art, music, and learning, which stimulate patients’ emotions and brain, can slow its progression once it has begun (Kimura et al., 2002; Brotons and Koger, 2000; Kawashima, 2002). However, there is room for improvement in all such treatments.
As for the interaction between Paro and dementia patients in nursing homes, behavioral improvements were observed in several cases. For example, a patient who moaned continuously was able to relax and then started to talk to the therapist (Marti et al., 2006). After playing with Paro, another patient who often tried to return home stopped doing so; her wandering symptom improved.
Robot therapy for dementia patients was conducted at a neurosurgery clinic to investigate the physiological influences of the treatment (Wada et al., 2008). Diagnosis Method of Neuronal Dysfunction (DIMENSION) was used to record each patient’s EEG before and after 20 minutes of robot therapy (Musha et al., 2002). In addition, a questionnaire concerning each subject’s impression of Paro was conducted. The results showed that 50% of 14 valid subjects’ condition of cortical neurons activity improved by interacting with Paro. This was especially true for patients who were particularly fond of Paro.
In Japan, the cost of care for a dementia patient by social welfare insurance is about 40,000 USD per year, and the patient’s life expectancy is about 8 years. In Denmark, the cost is about double. This represents an enormous burden on the municipalities that provide long-term care insurance. Useful and convenient methods for the prevention of dementia are urgently needed. Paro has been on the market since 2005. The price is about 4600 euros. However, the running costs consist almost only of a battery-recharging fee as the battery is designed to last for over 10 years. Paro can be used even without a specially-trained therapist although people must attend a one-day seminar in the EU in order to use him. Several municipalities in Japan know about Paro’s effects and support his introduction. For example, Nanto city, Toyama, bought eight Paros and introduced them to day-service centers in the city. Tsukuba city, Ibaraki, established a subsidy for purchasing Paro.
Meanwhile, a dementia-care center in Copenhagen, Denmark, investigated the effects of robot therapy on dementia patients as part of the national project “Be-Safe”. Twelve Paros were introduced in 10 different places. The results obtained from the seven-month clinical trial showed that Paro had positive effects on the patients. Based on the results, the Danish government decided to introduce 1,000 units of Paro to nearly all the elderly-care facilities in Denmark. So far, more than 100 institutions, with more than 200 licensed staff, have been using Paro in 2010. In addition, other European countries including Norway, the Netherlands, and Germany, have adopted the same system, and have started to use Paro with licensed staff.
Other research
Robot therapy, using commercially-available animal-type robots, such as AIBO and NeCoRo has been attempted (Libin and Libin, 2004; Kanamori et al., 2002; Tamura et al., 2004). For example, Libin introduced NeCoRo to a nursing home and observed the patients’ interaction (Libin and Libin, 2004). Kanamori et al. examined the effects of AIBO on the elderly in a nursing home (Kanamori et al., 2002). By measuring the hormones in saliva, they found that stress decreased after a one-hour interaction with AIBO, and that loneliness was reduced after 20 sessions over a seven-week period. Tamura et al. compared the exposure of patients to AIBO with the effect of exposure to a toy dog (Tamura et al., 2004). They found that AIBO did not encourage much interaction, and required more intervention from an occupational therapist.
Because they are not designed for therapy, these commercially-produced robots easily break while interacting with people. Therefore, it is difficult to use them in long-term situations.
Conclusion
Various robots have been developed and are being introduced into our lives as commercial products. Each robot is designed for a specific purpose. The seal-type mental-commitment robot, Paro, whose goal is to enrich daily life and heal human minds as “life innovation”, is designed to maintain long-term interaction with people and provide them with psychological, physiological, and social benefits.
Robot therapy, or mental-health care using animal-type robots, is an emerging field. The results of exploratory experiments showed that Paro has a great potential to provide mental-health care for older people. However, more subjects and a control group are necessary to scientifically verify its effects. Further experiments will be conducted in this respect.
As for ethical issues, the experiments using Paro mentioned above were conducted under the supervision of the ethical committee of each organization. Only people who, and whose relatives who, agreed with robot therapy, participated. In addition, some were worried that old people would be left alone with Paro when the caregiver left them to interact with him. But, the opposite has proved true. Paro acts as a social mediator, providing a common topic for the elderly and encouraging them to communicate with each other. Currently, the methods used in robot-therapy are the responsibility of the caregivers and its effects are influenced by them. To ensure Paro’s potential by developing effective ways to use it is the next step.
At present, approximately 1700 units of Paro have been sold worldwide (about 1500 units in Japan, 120 units in Denmark, and 100 units in other countries). Paro has a high rate of acceptance and similar psychological effects are seen in each country. However, there are initially some cultural differences in the acceptance of Paro. People in Europe tend to note the effects of interaction with Paro and accept him as a therapeutic tool because animal therapy has been used widely in hospitals and nursing homes. Therefore, all Paros are used at institutions in Europe. Meanwhile, in Asian countries, animal therapy is not commonly accepted although many people have owned pets recently. In Japan, nearly 70% of users are individuals. They tend to accept Paro as their companion more than as a therapeutic tool. In the U.S., they tend to accept Paro as a therapeutic tool as well as a companion (Shibata et al., 2009), though the Food and Drug Administration (FDA) of the U.S. certified Paro as a “medical device” in 2009. Therefore, it is important to introduce Paro in a suitable manner based on the cultural differences.
Robot therapy in medical and welfare facilities is spreading in our society. Further studies should be conducted to integrate robot therapy into our societies at large.
Bibliography
ADI Factsheet (1999), “The Prevalence of Dementia”, Alzheimer’s Disease International, 3.
ADI Factsheet (1999), “Psychiatric and Behavioural Disturbances in Dementia”, Alzheimer’s Disease International, 7.
Andrade, C. and R. Radhakrishnan (2009), “The Prevention and Treatment of Cognitive Decline and Dementia: An Overview of Recent Research on Experimental Treatments”, Indian J Psychiatry 51(1), pp. 12-25.
Baun, M., N. Bergstrom, N. Langston and L. Thoma (1984), “Physiological Effects of Human/Companion Animal Bonding”, Nurs. Res. 33(3), pp. 126-129.
Bischoff, R. and V. Graefe (2004), “HERMES—a Versatile Personal Robotic Assistant”, Proceed IEEE 92(11), pp.1759-1779.
Brotons, M. and S. Koger (2000), “The Impact of Music Therapy on Language Functioning in Dementia”, J Music Ther 37(3), pp. 183-195.
Daies, B. and M. Knapp (eds.) (1981), Old People’s Homes and the Production of Welfare, Routledge & Kegan Paul PLC.
Delta Society (1991), Animal-Assisted “Therapy and Crack Babies: a New Frontier”, Newsletter 1(2).
Delta Society (1996), Standards of Practice for Animal-Assisted Activities and Therapy.
Druin, A. and J. Hendler (eds.) (2000), Robots for Kids; Exploring New Technologies for Learning, Morgan Kaufmann Pub.
Fick, K. M. (1993), “The Influence of an Animal on Social Interactions of Nursing Home Residents in a Group Setting”, Am J Occupat Ther 47(6), pp. 529-534.
Fine, A. H. (2006), Handbook on Animal Assisted Therapy: Theoretical Foundations and Guidelines for Practice, 2nd edition, Academic Press.
Friedmann, E., A. Katcher, J. Lynch and S. Thomas (1980), “Animal Companions and One-year Survival of Patients after Discharge from a Coronary Care Unit”, Public Health Rep; 95(4): pp. 307-312.
Fritz, C. L. et al. (1995), “Association with Companion Animals and the Expression of Non-cognitive Symptoms in Alzheimer’s Patients”, J Nerv Ment Dis 183(7), pp. 459-463.
Fujita, M. (2004), “On Activating Human Communications With Pet-Type Robot AIBO”, Proceed IEEE 92(11), pp. 1804-1813.
Gammonley, J., J. Yates (1991), “Pet Projects Animal Assisted Therapy in Nursing Homes”, J Gerontol Nurs 17(1), pp. 12-15.
Garrity, T., L. Stallones, M. Marx and T. Johnson (1989), “Pet Ownership and Attachment as Supportive Factors in the Health of the Elderly”, Anthrozoos 3(1), pp. 35-44.
HAL, http://wwwcyberdynejp.
Haladay, J. (1989), “Animal Assisted Therapy for PWAs—Bringing a Sense of Connection”, AIDS Patient Care, pp. 38-39.
Hart, L., B. Hart, B. Bergin (1987), “Socializing Effects of Service Dogs for People with Disabilities”, Anthrozoos 1(1), pp. 41-44.
Hirai, K. (1998), “Humanoid Robot and Its Applications”, Proceedings IARP Int. Conf. Humanoid and Human Friend Robot 1, pp. 1-4.
ifbot. http://wwwbusiness-designcojp.
Joba, http://panasonicjp/fitness.
Kale, M. (1992), “Kids & Animals”, Interactions 10(3), pp. 17-21.
Kanamori, M., M. Suzuki and M. Tanaka, “Maintenance and Improvement of Quality of Life among Elderly Patients Using a Pet-Type Robot”, Nippon Ronen Igakkai Zasshi 39(2), pp. 214-218.
Kawashima, R. (2002). “[Cognitive Rehabilitation for Alzheimer Disease — the Learning Therapy]”, Rinsho Shinkeigaku, 45(11), pp. 864-866.
Kimura, S., K. Kaneko, K. Nishida, K. Sekine, T. Musha and M. Oh (2002), “[Effectiveness of the Creative Art Therapy by Using the Diagnosis Method of Neuronal Dysfunction (DIMENSION)]”, Report Kansei Fukushi Res. Cent. 3, pp. 195-200.
Kitano, H. et al. (1998), “The Robocup ’97 Synthetic Agents Challenge”; in RoboCup-97: Robot Soccer World Cup I. Springer, pp. 62-73.
Kuroki, Y., T. Ishida, J. Yamaguchi, M. Fujita and T. Doi (2002), “A Small Biped Entertainment Robot, J. Robot”, Mechatron 14(1), pp. 7-11.
Lago, D., M. Delaney, M. Miller and C. Grill (1989), “Companion Animals, Attitudes toward Pets, and Health Outcomes among the Elderly: A Long-Term Follow-up”, Anthrozoos 3(1), pp. 25-34.
Libin, A. and E. Libin (2004), “Person-Robot Interactions from the Robopsychologists’ Point of View: The Robotic Psychology and Robotherapy Approach”, Proceed. IEEE 92(11), pp. 1789-1803.
Lorish, C. D. and R. Maisiak (1986), “The Face Scale: A Brief, Nonverbal Method for Assessing Patient Mood”, Arthritis and Rheumatism 29(7), pp. 906-909.
Lund, H. (2004), “Modern Artificial Intelligence for Human-Robot Interaction”, Proceed. IEEE 92(11), pp. 1821-1838.
Marian, R. Banks and William A. Banks (2002), “The Effects of Animal-Assisted Therapy on Loneliness in an Elderly Population in Long-Term Care Facilities”, J Gerontol A: Biol Sci Med Sci 57, pp. 428-432.
Marti, P., M. Bacigalupo, L. Giusti, C. Mennecozzi and T. Shibata (2006), “Socially Assistive Robotics in the Treatment of Behavioural and Psychological Symptoms of Dementia”, Proceed. Int. Conf. BioRob, pp. 483-488.
Marti, P., V. Palma, A. Pollini, A. Rullo and T. Shibata (2005) “My Gym Robot”, Proceed. Symp. Robot Companions, pp. 64-73.
Matsumoto, O., K. Komoriya, T. Hatase and H. Nishimura (2006), “Autonomous Traveling Control of the ‘TAO Aicle’ Intelligent Wheelchair”, Proceed IEEE/RSJ Int Conf IROS, pp. 4322-4327.
Musha, T., T. Asada, F. Yamashita, T. Kinoshita, Z. Chen, H. Matsuda et al. (2002), “A New EEG Method for Estimating Cortical Neuronal Impairment That Is Sensitive to Early-Stage Alzheimer’s Disease”, Neurophysiol Clin 113, pp. 1052-1058.
NeCoRo. http://wwwnecorocom/homehtml, in press.
Nishikaze, O. et al. (1995) “Distortion of Adaptation (Wear & Tear and Repair & Recovery)-Urine 17- KS-Sulfates and Psychosocial Atressin”, Humans-Job Stress Res 3, pp. 55-64.
PaPeRo. http://wwwincxneccojp/robot/robotcenterhtml.
Pines (1981), “The Burnout Measure”, paper presented at the National Conference on Burnout in the Human Services, Philadelphia, November.
Richeson, N. E. (2003), “Effects of Animal-Assisted Therapy on Agitated Behaviors and Social interactions of Older Adults with Dementia”, Am J Alzheim. Dis. Other Dement 18(6), pp. 353-358.
Robo-One. http://wwwrobo-onecom.
Saito, T., T. Shibata, K. Wada and K. Tanie (2002), “Examination of Change of Stress Reaction by Urinary Tests of Elderly before and after Introduction of Mental Commit Robot to an Elderly Institution”, Proceed. Int. Symp. AROB 1, pp. 316-319.
Selye, H. (1970), “Stress and Aging”, Journal of American Geriatric Society 18, pp. 669-676.
Shibata, T. (2004), “An Overview of Human Interactive Robots for Psychological Enrichment”, Proceed. IEEE 92(11), pp. 1749-1758.
Shibata, T. (2004), “Ubiquitous Surface Tactile Sensor”,TExCRA, p. 56.
Shibata, T., K. Inoue and R. Irie (1996), “Emotional Robot for Intelligent System – Artificial Emotional Creature Project”, Proceed. IEEE RO-MAN, pp. 466-471.
Shibata, T. and R. Irie (1997), “Artificial Emotional Creature for Human-Robot Interaction – A New Direction for Intelligent System”, Proceed IEEE/ASME Int Conf AIM 47.
Shibata, T., T. Mitsui, K. Wada and K. Tanie (2002), “Subjective Evaluation of Seal Robot: Paro – Tabulation and Analysis of Questionnaire Results”, J Robot Mechatron 14(1), pp. 13-19.
Shibata, T., T. Mitsui, K. Wada, A. Touda, T. Kumasaka, K. Tagami et al. (2001), “Mental Commit Robot and its Application to Therapy of Children”, Proceed. IEEE/ASME Int. Conf. AIM, pp. 1053-1058.
Shibata, T. and K. Tanie (2000), “Influence of A-Priori Knowledge in Subjective Interpretation and Evaluation by Short-Term Interaction with Mental Commit Robot”, Proceed.IEEE/RSJ Int Conf IROS 1, pp. 169-174.
Shibata, T., T. Tashima and K. Tanie (1999), “Subjective Interpretation of Emotional Behavior through Physical Interaction between Human and Robot”, Proceed. IEEE Int. Conf. SMC, pp. 1024-1029.
Shibata, T., K. Wada, Y. Ikeda and S. Sabanovic (2009), “Cross-Cultural Studies on Subjective Evaluation of Seal Robot”, Advanced Robotics, in press.
Shibata, T., K. Wada, T. Saito and K. Tanie (2001), “Robot Assisted Activity for Senior People at Day Service Center”, Proceed. Int. Conf. ITM, pp. 71-76.
Tamura, T., S. Yonemitsu, A. Itoh, D. Oikawa, A. Kawakami, Y. Higashi et al. (2004), “Is an Entertainment Robot Useful in the Care of Elderly People With Severe Dementia?”, J Gerontol. A Biol Sci. Med. Sci. 2004 59A(1), pp. 83-85.
Wada, K. and T. Shibata (2007), “Living with Seal Robots – Its Socio-Psychological and Physiological Influences on the Elderly in a Care House”, IEEE Trans. Robot 23(5), pp. 972-980.
Wada, K., T. Shibata, T. Musha and S. Kimura (2008), “Robot Therapy for Elders Affected by Dementia”, IEEE Eng Med Biol Mag 27(4), pp. 53-60.
Wada, K., T. Shibata, T. Saito, K. Sakamoto and K. Tanie (2005), “Psychological and Social Effects of One Year Robot-Assisted Activity on Elderly People at a Health Service Facility for the Aged”, Proc. IEEE ICRA, pp. 2796-2801.
Wada, K., T. Shibata, T. Saito and K. Tanie (2004), “Effects of Robot-Assisted Activity for Elderly People and Nurses at a Day Service Center”, Proceed. IEEE 92(11), pp. 1780-1788.
Wada, K., T. Shibata, T. Saito and K. Tanie (2004), “Psychological and Social Effects in Long-Term Experiment of Robot-Assisted Activity to Elderly People at a Health Service Facility for the Aged”, Proceed. IEEE/RSJ Int. Conf. IROS, pp. 3068-3073.
WPA/PTD Educational Program on Depressive Disorders “Depressive Disorders in Older Persons”, Module 3: Depressive Disorders in Older Persons http://www.wpanet.org/education/ed-program-guidelines.html
Yesavage, J. A. (1988), “Geriatric Depression Scale”, J Psychopharmacology Bulletin 24(4), pp. 709-711.
Comments on this publication